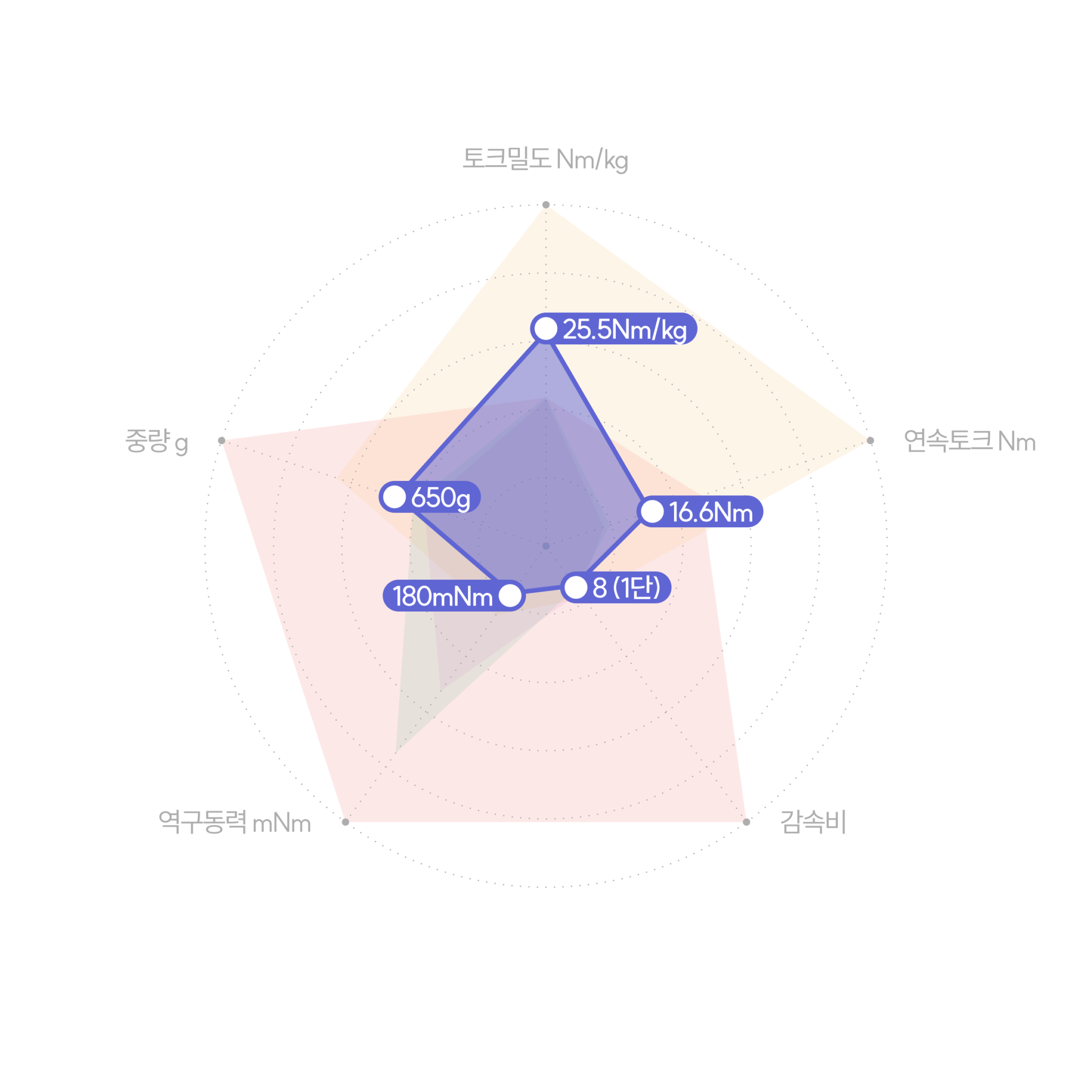
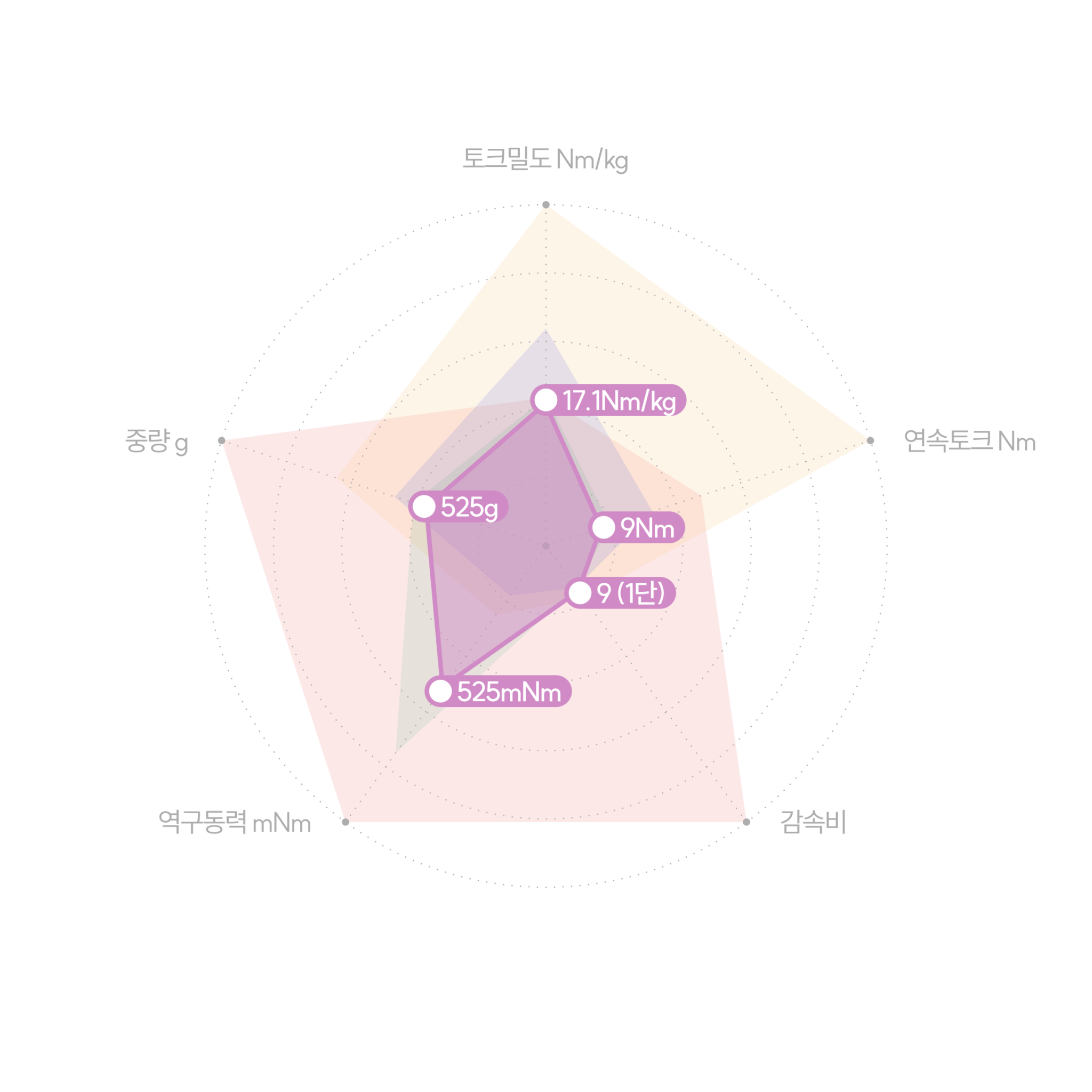
"토크밀도(Nm/kg)는 모터의 단위 무게당 연속 토크를 의미하며, 높을 수록 작고 강한 모터임을 의미합니다"
"연속 토크(Nm)는 시간에 상관없이 지속적으로 낼수있는 토크를 의미하며, 높을 수록 효율이 좋고 강한 모터임을 의미합니다."
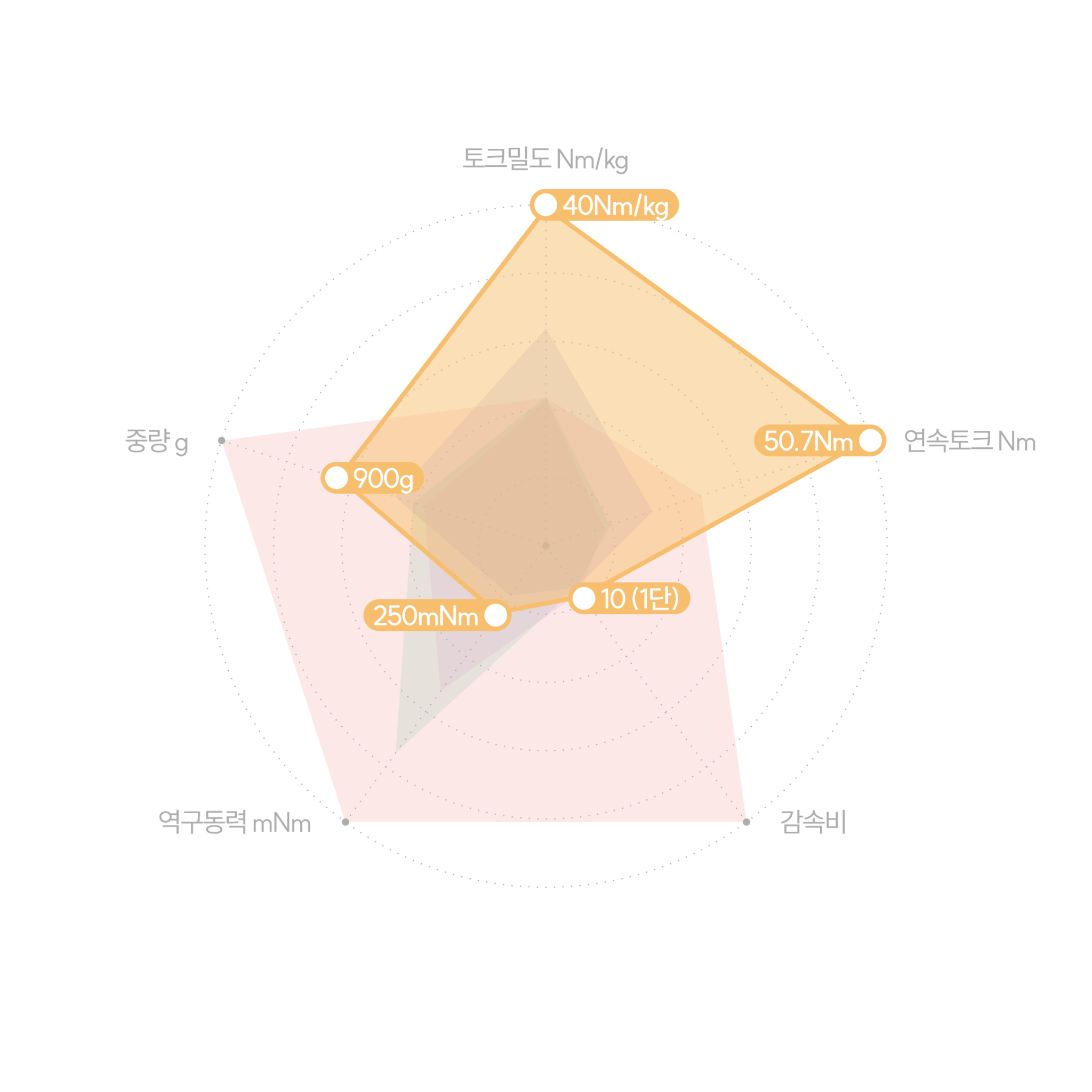
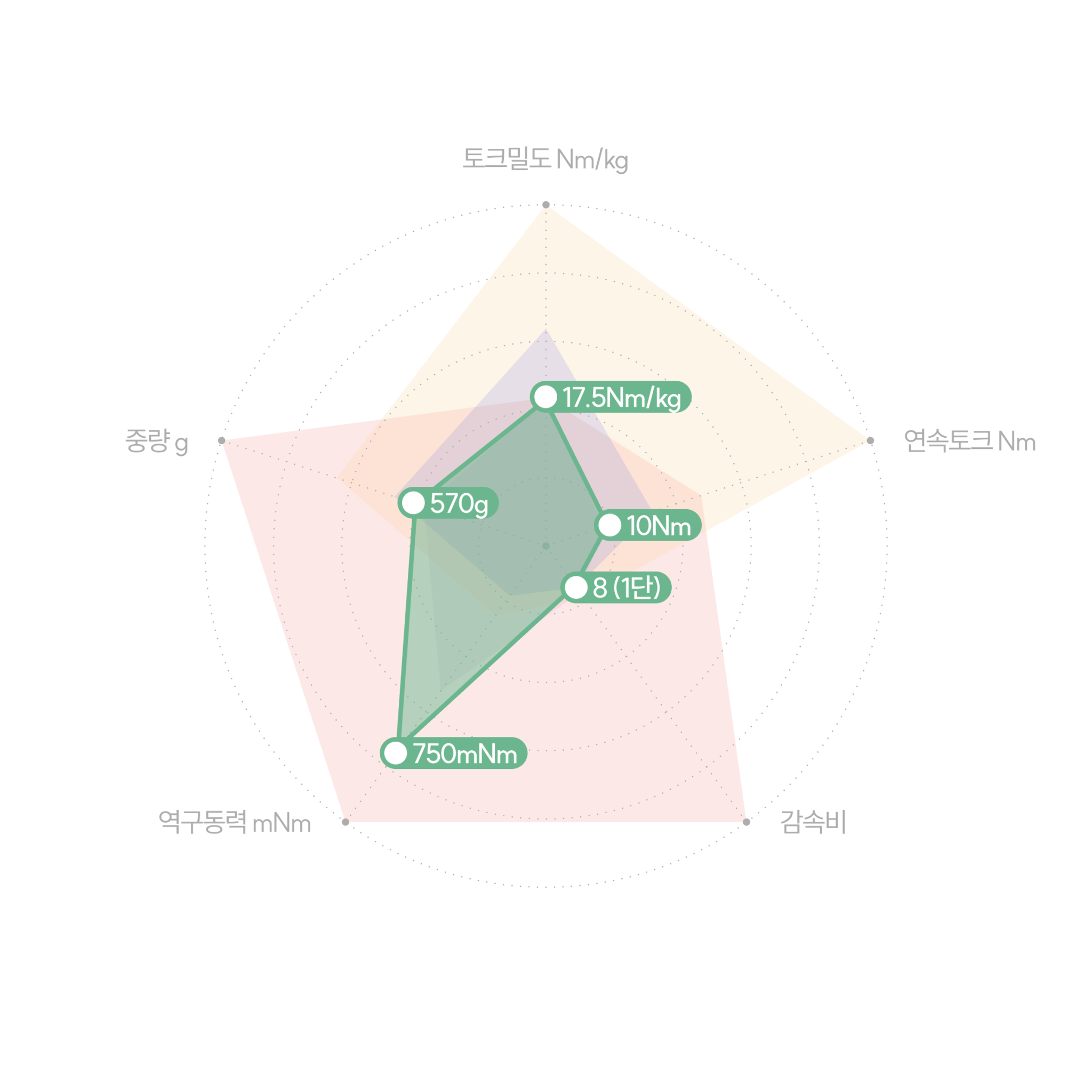
"토크밀도(Nm/kg)는 모터의 단위 무게당 연속 토크를 의미하며, 높을 수록 작고 강한 모터임을 의미합니다"
"연속 토크(Nm)는 시간에 상관없이 지속적으로 낼수있는 토크를 의미하며, 높을 수록 효율이 좋고 강한 모터임을 의미합니다."
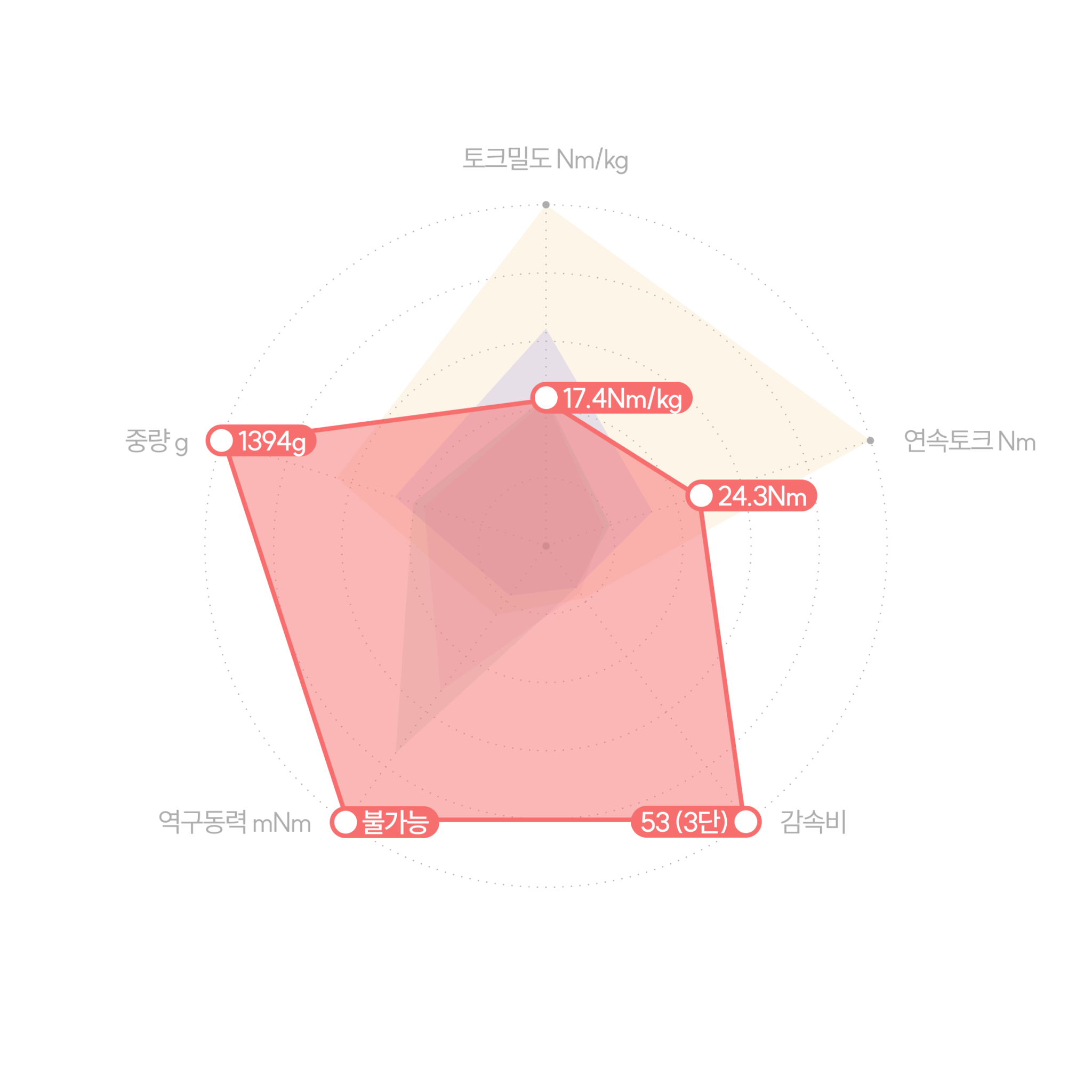
"역구동성(Back Drivability)은 외부 힘으로 모터를 역으로 구동할 수 있는 정도를 의미하며,
낮을수록 로봇의 관절이 외부 충격을 흡수하고 유연한 동작이 가능해집니다.이를 통해 인간과의 상호작용에서 안전성이 향상됩니다."
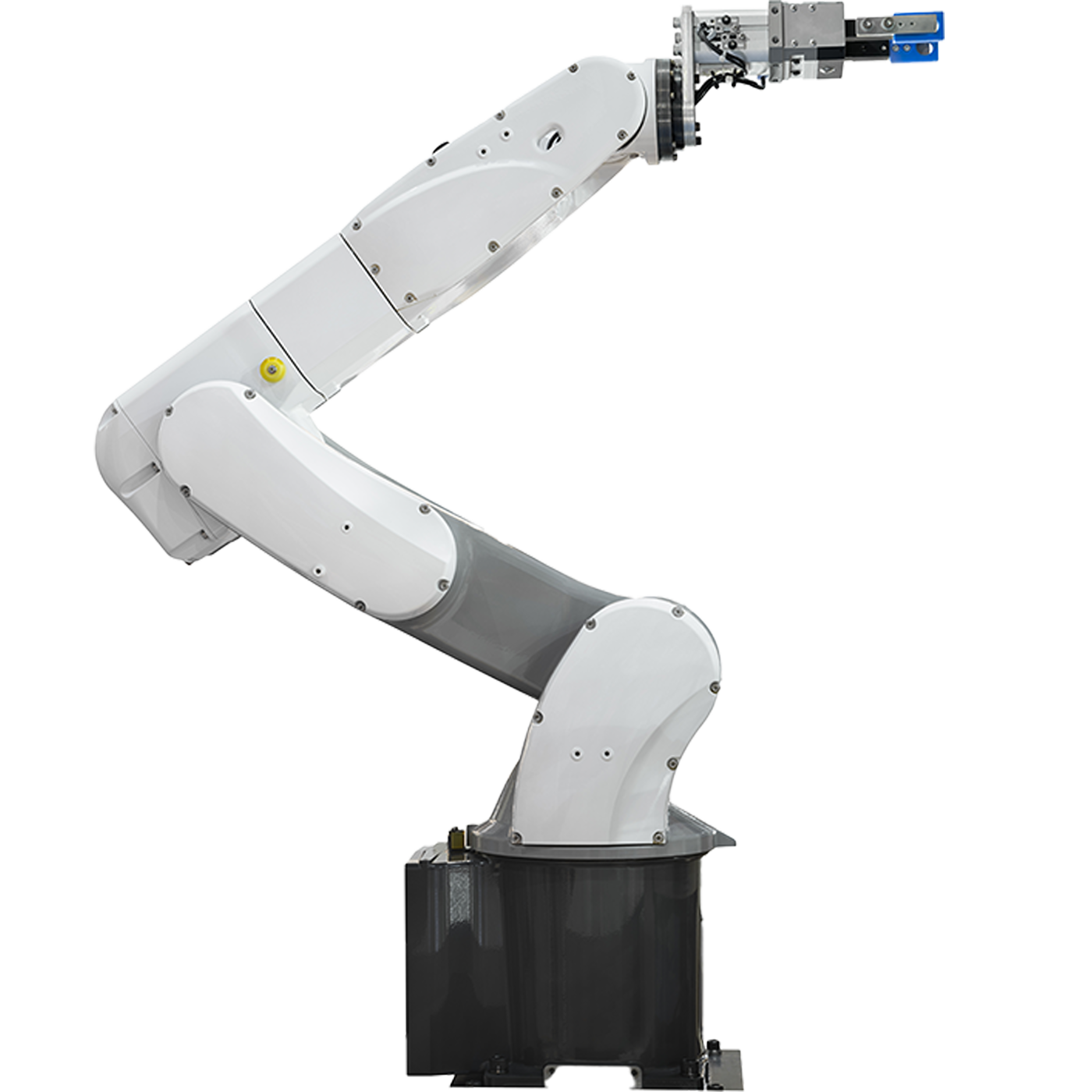
모터는 현실 공간에서 로봇이 인간과 접촉하는 가장 중요한 부품입니다. 그러나 기존의 로봇용 서보 모터는 낮은 토크밀도로 인해 고마찰 감속기를 필수적으로 사용하며 로봇 관절에 지나친 강성을 유발합니다.
이는 인간과 예기치 못한 충돌시에 큰 부상을 야기하는 등 안전성 측면에 큰 저하를 초래합니다.
또한 감속기의 사용은 비선형 마찰로 인해 토크센서의 사용이 필수적이며 이로 인해 로봇 어플리케이션들의 제작 비용이 증가하게 되며 늘어난 무게와 크기로 비효울적인 구동을 하게되며 로봇의 잦은 파손을 야기합니다.
따라서 협동 로봇, 휴머노이드 로봇, 보행 로봇, 웨어러블 로봇, 엑소스켈레톤 같은 미래 로봇은 인간의 관절과 같은 유연하면서 강한 관절이 필요합니다.
패러데이다이나믹스의 차세대 서보 모터는 인간 근육의 특성을 구현합니다. 신규 자성체 개발과 자기장 집중 기술을 통해 세계 최고 수준의 토크 밀도와 역구동성을 실현했으며, 작은 전류로 강한 토크가 나오기에 최상의 연속 토크와 높은 효율을 보여줍니다.
또한 2% 미만의 토크 맥동과 최소화된 코깅토크로 정밀 제어를 구현합니다. 이러한 혁신적 기술은 미래 로봇 개발의 새로운 지평을 열며, 인간 사의 안전한 로봇 도입을 가속화합니다.
패러데이다이나믹스는 최고의 성능을 넘어 끊임없는 혁신을 추구합니다. 고성능 모터용 자성 소재 연구, 모터의 독립제어 및 다상제어 기술 개발 및 최적의 제어시스템 구축을 통해 차세대 로봇 기술의 새로운 지평을 열어갑니다.
모터는 현실 공간에서 로봇이 인간과 접촉하는 가장 중요한 부품입니다. 그러나 기존의 로봇용 서보 모터는 낮은 토크밀도로 인해 고마찰 감속기를 필수적으로 사용하며 로봇 관절에 지나친 강성을 유발합니다.
이는 인간과 예기치 못한 충돌시에 큰 부상을 야기하는 등 안전성 측면에 큰 저하를 초래합니다.
또한 감속기의 사용은 비선형 마찰로 인해 토크센서의 사용이 필수적이며 이로 인해 로봇 어플리케이션들의 제작 비용이 증가하게 되며 늘어난 무게와 크기로 비효울적인 구동을 하게되며 로봇의 잦은 파손을 야기합니다.
따라서 협동 로봇, 휴머노이드 로봇, 보행 로봇, 웨어러블 로봇, 엑소스켈레톤 같은 미래 로봇은 인간의 관절과 같은 유연하면서 강한 관절이 필요합니다.
패러데이다이나믹스의 차세대 서보 모터는 인간 근육의 특성을 구현합니다. 신규 자성체 개발과 자기장 집중 기술을 통해 세계 최고 수준의 토크 밀도와 역구동성을 실현했으며, 작은 전류로 강한 토크가 나오기에 최상의 연속 토크와 높은 효율을 보여줍니다.
또한 2% 미만의 토크 맥동과 최소화된 코깅토크로 정밀 제어를 구현합니다. 이러한 혁신적 기술은 미래 로봇 개발의 새로운 지평을 열며, 인간 사의 안전한 로봇 도입을 가속화합니다.
패러데이다이나믹스는 최고의 성능을 넘어 끊임없는 혁신을 추구합니다. 고성능 모터용 자성 소재 연구, 모터의 독립제어 및 다상제어 기술 개발 및 최적의 제어시스템 구축을 통해 차세대 로봇 기술의 새로운 지평을 열어갑니다.
모터는 현실 공간에서 로봇이 인간과 접촉하는 가장 중요한 부품입니다. 그러나 기존의 로봇용 서보 모터는 낮은 토크밀도로 인해 고마찰 감속기를 필수적으로 사용하며 로봇 관절에 지나친 강성을 유발합니다. 이는 인간과 예기치 못한 충돌시에 큰 부상을 야기하는 등 안전성 측면에 큰 저하를 초래합니다.
또한 감속기의 사용은 비선형 마찰로 인해 토크센서의 사용이 필수적이며 이로 인해 로봇 어플리케이션들의 제작 비용이 증가하게 되며 늘어난 무게와 크기로 비효울적인 구동을 하게되며 로봇의 잦은 파손을 야기합니다.
따라서 협동 로봇, 휴머노이드 로봇, 보행 로봇, 웨어러블 로봇, 엑소스켈레톤 같은 미래 로봇은 인간의 관절과 같은 유연하면서 강한 관절이 필요합니다.
패러데이다이나믹스의 차세대 서보 모터는 인간 근육의 특성을 구현합니다. 신규 자성체 개발과 자기장 집중 기술을 통해 세계 최고 수준의 토크 밀도와 역구동성을 실현했으며, 작은 전류로 강한 토크가 나오기에 최상의 연속 토크와 높은 효율을 보여줍니다.
또한 2% 미만의 토크 맥동과 최소화된 코깅토크로 정밀 제어를 구현합니다. 이러한 혁신적 기술은 미래 로봇 개발의 새로운 지평을 열며, 인간 사의 안전한 로봇 도입을 가속화합니다.
패러데이다이나믹스는 최고의 성능을 넘어 끊임없는 혁신을 추구합니다. 고성능 모터용 자성 소재 연구, 모터의 독립제어 및 다상제어 기술 개발 및 최적의 제어시스템 구축을 통해 차세대 로봇 기술의 새로운 지평을 열어갑니다.